Prof. Gregory J. Stein
RAIL Group, GMU
I am an Assistant Professor of Computer Science at George Mason University where I run the Robotic Anticipatory Intelligence & Learning (RAIL) Group. Our research, at the intersection of robotics and machine learning, is centered around developing representations that allow robots to better understand the impact of their actions, so that they may plan quickly and intelligently in a dynamic and uncertain world.
Read more on our research page or see our full publication list.
See also my curriculum vitae (CV).
Recent and Highlighted News
- September 19, 2025 I gave a talk at UT Austin’s AI Seminar Series. A recording of my talk will be available soon.
- Summer 2025 My lab is delighted to be hosting three high school summer student interns through the
gmu assip program. Welcome all! - May 19, 2025 Many in the lab are headed to
ieee icra 2025 in Atlanta. Not only are two of my students presenting papers, but my student Abhishek Paudel is both presenting a workshop paper on deployment-time prompt selection forllm -informed navigation under uncertainty at theicra fmns workshop and has been selected for theicra Doctoral Consortium for his work “Introspection for Long-Horizon Robot Planning under Uncertainty.” - February 19, 2025 I gave a talk at Cornell University’s Robotics Seminar. Thanks again for having me! Here’s a recording of my talk, outlining our lab’s recent advances in planning under uncertainty:
- January 28, 2025 My lab had two papers accepted to
ieee icra 2025 : one on anticipatory planning for large-scale home environments and another on hybrid social navigation. We look forward to sharing these in Atlanta. - January 9, 2025 I gave a talk at University of Milan on my recent work at the intersection of learning and anticipation for reliable task planning.
- December 2024 I, as principal investigator, and
gmu collaborators Daigo Shishika, Xuesu Xiao, and Xuan Wang have been awarded a $1.7 million grant from the US Army Research Lab’s Tactical Behaviors and Maneuvers program. Read more about through thegmu news announcement. - November 6, 2024 The
rail Group had a busy Conference on Robot Learning (c orl ) 2024! First, my student Abhishek presentend a paper on multi-strategy domain adaptation for fast deployment-time improvement for navigation under uncertainty. Second, the lab presented a workshop paper at the Learning Effective Abstractions for Planning (leap ) Workshop, at which I also gave an invited talk. - October 16, 2024 We presented three papers at IROS 2024, spanning topics on active information gathering, learning-informed navigation, and team coordination on graphs. I also co-chaired the Robot Motion Planning 1 session.
- Fall 2024 I gave invited talks at Stevens Institute of Technology, Northeastern, The AI Institute (formerly BDAI), and Lehigh University. Thanks to all for hosting me and it was a pleasure getting to share all our exciting work!
- Summer 2024 The RAIL Group is delighted to be hosting four high school summer student interns through the George Mason University ASSIP program. Welcome to the lab!
- September 08 2023 I will be attending a workshop at Penn to contribute to the next National Robotics Roadmap. Update: the 2024 Roadmap for US Robotics is now live!
- December 2022 I co-organized a workshop Learning, Perception, and Abstraction for Long-Horizon Planning at CoRL 2022. Video for the entire workshop here!
- Fall 2020 I will be joining the Department of Computer Science at George Mason University as an Assistant Professor.
- October 2018 My paper Learning over Subgoals for Efficient Navigation of Structured, Unknown Environments was a Best Paper Finalist at the 2018 Conference on Robot Learning. My accompanying 15 minute talk was awarded Best Oral Presentation:
Selected Publications
See also our full publication list.
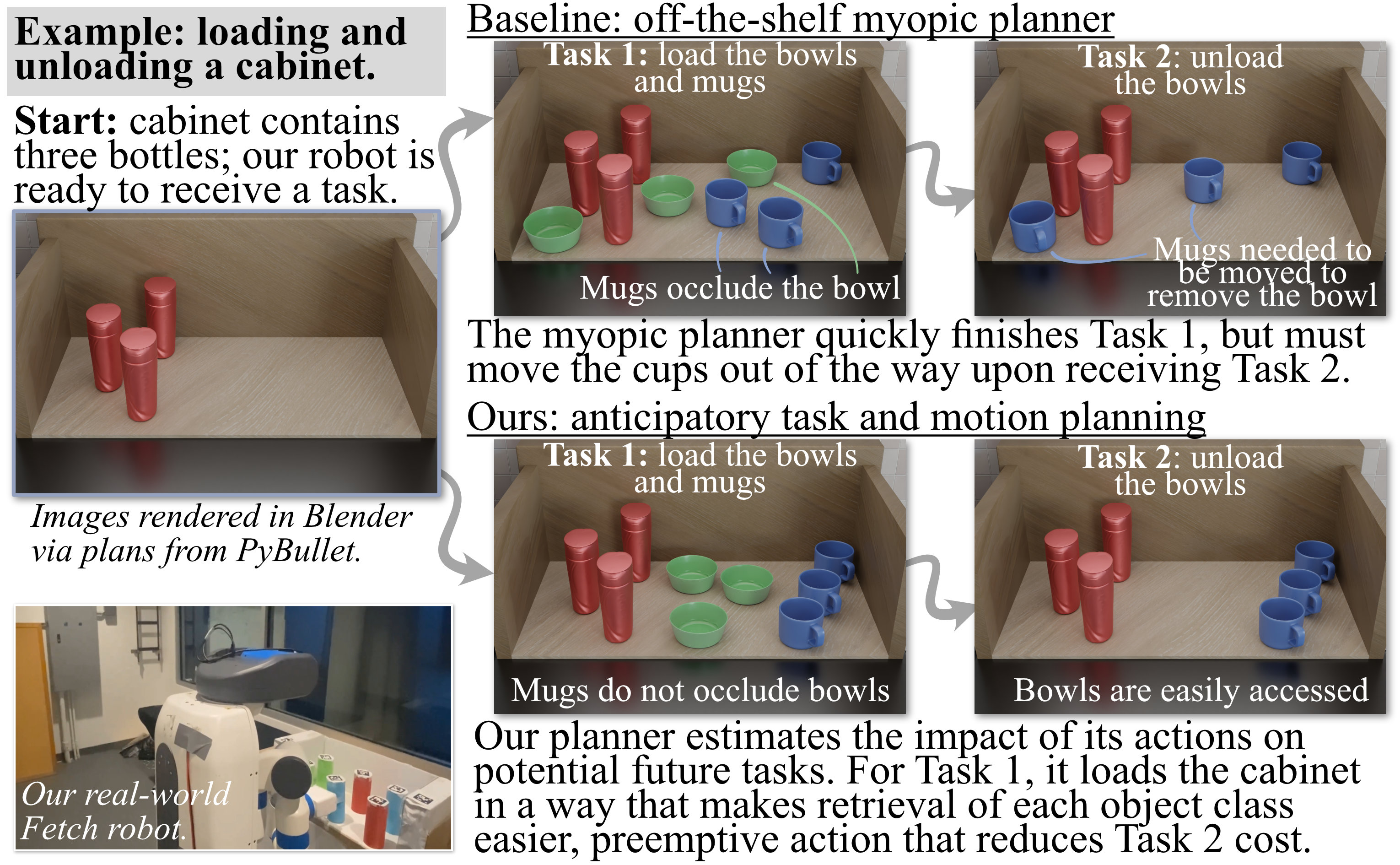
- Roshan Dhakal, Duc M. Nguyen, Tom Silver, Xuesu Xiao, and Gregory J. Stein. “Anticipatory Task and Motion Planning.” Robotics and Automation Letters (RA-L). 2025. in press.
ArXiv link show bibtex
- Abhish Khanal, Joseph Prince Mathew, Cameron Nowzari, Gregory J Stein. “Learning-Augmented Model-Based Multi-Robot Planning for Time-Critical Search and Inspection Under Uncertainty.” In: International Conference on Automation Science and Engineering (CASE). 2025. paper. show bibtex
- Abhishek Paudel, Xuesu Xiao, and Gregory J. Stein. “Multi-Strategy Deployment-Time Learning and Adaptation for Navigation under Uncertainty.” In: Conference on Robot Learning (CoRL). 2024. paper, video. show bibtex
- Raihan Islam Arnob and Gregory J. Stein. “Active Information Gathering for Long-Horizon Navigation Under Uncertainty by Learning the Value of Information.” In: International Conference on Intelligent Robots and Systems (IROS). 2024. paper. show bibtex
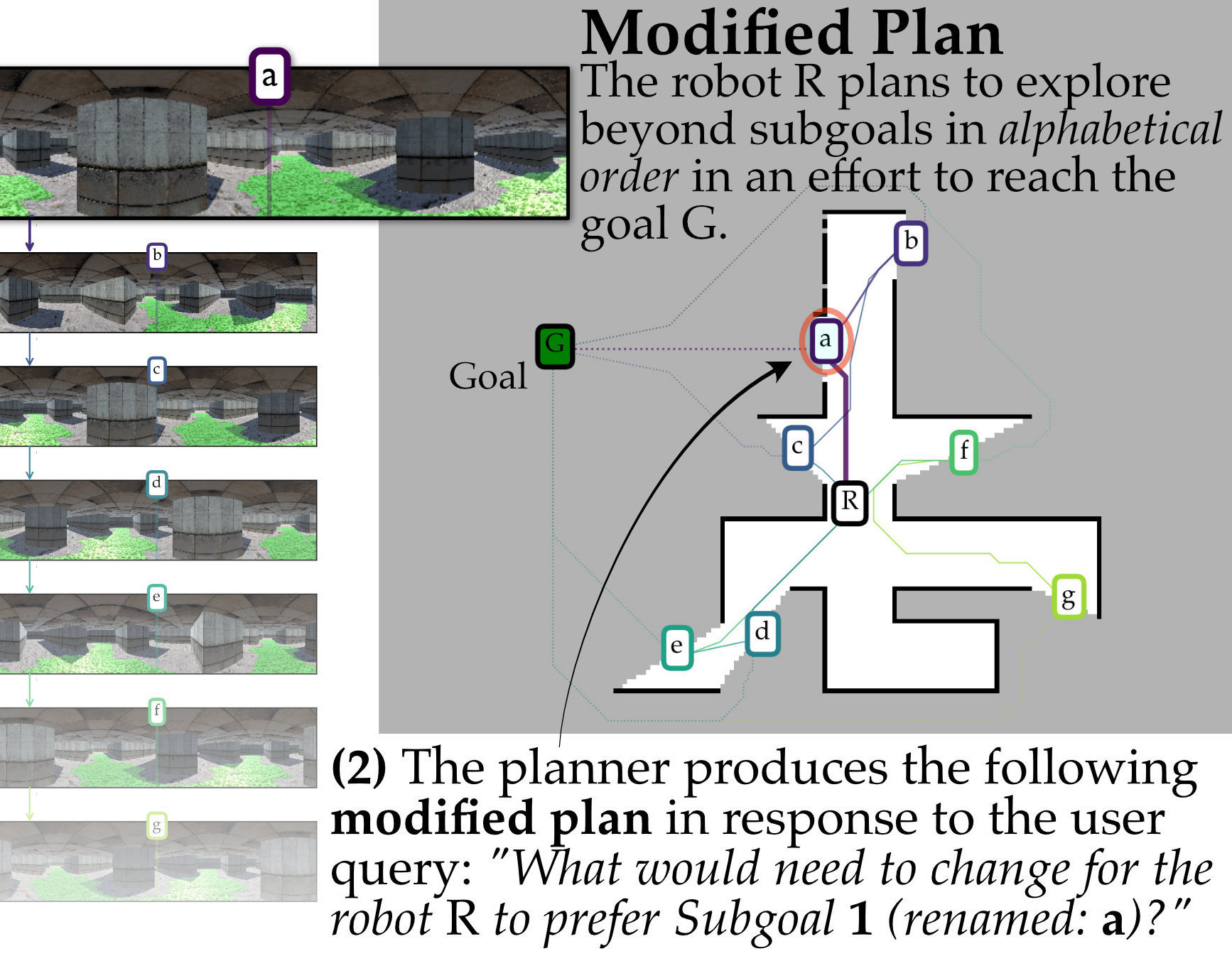
- Gregory J. Stein. “Generating High-Quality Explanations for Navigation in Partially-Revealed Environments.” In: Advances in Neural Information Processing Systems (NeurIPS). 2021. paper, talk (13 min), GitHub, blog post. show bibtex
- Christopher Bradley, Adam Pacheck, Gregory J. Stein, Sebastian Castro, Hadas Kress-Gazit, and Nicholas Roy. “Learning and Planning for Temporally Extended Tasks in Unknown Environments.” In: International Conference on Robotics and Automation (ICRA). 2021. paper, talk (3 min). show bibtex
- Gregory J. Stein, Christopher Bradley, and Nicholas Roy. “Learning over Subgoals for Efficient Navigation of Structured, Unknown Environments”. In: Conference on Robot Learning (CoRL). 2018. paper, talk (14 min). show bibtex
Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
 Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
Blog Posts
-
26 Jun 2025
Communication & Learning RAIL Group Paper Preparation and Style Guide[Communication & Learning] This living guide is a collection of best practices surrounding paper preparation, particularly in LaTeX. -
01 May 2025
Research Anticipatory Planning for Performant Long-Lived Robot in Large-scale Home-like Environments[Research] We improve the performance of a household mobile robot using anticiaptory planning for large-scale home and restaurant like environments. -
06 Dec 2024
Communication & Learning When should PhD students meet with their advisor? A guide[Communication & Learning] Why have meetings with my advisor? This document gives an overview of how I think about when and how often my PhD students need to meet with me and what the substance of those meetings should be. -
01 May 2024
Workflow & Process PaperOps: run experiments and add results to a PDF with a single Make command[Workflow & Process] A proof-of-concept for automated running of experiments and automatically including results and statistics in a LaTeX PDF via Make. -
01 Oct 2023
Research Improving Reliable Navigation under Uncertainty with Non-Local Information Informed Predictions[Research] We improve reliable, long-horizon, goal-directed navigation in partially-mapped environments by using non- locally available information to predict the goodness of temporally-extended actions that enter unseen space. -
30 Sep 2023
Research Data-Efficient Policy Selection for Navigation in Partial Maps[Research] We present a fast and reliable policy selection approach for navigation in partial maps that leverages information collected during deployment to introspect the behavior of alternative policies without deployment. -
07 Sep 2023
Communication & Learning A Communication Exercise: randomize slide presenters[Communication & Learning] I recently asked my students to prep Pecha Kucha-style presentations—18 slides that auto-advance every 20 seconds—and then told them to present each other’s slides, a fun and fantastic (if chaotic) way to improve slide quality. -
29 Aug 2023
Workflow & Process Seek out Opportunities to Mentor[Workflow & Process] Mentoring others can be incredibly valuable experience and so opportunities to mentor should be sought out. -
17 Jan 2023
Workflow & Process My strategies for idea generation through writing[Workflow & Process] This guide aims to outline my strategies to encourage idea generation, essential for long-term research progress, through a habit of regular writing. -
07 Jan 2023
Workflow & Process Write code and tests in tandem[Workflow & Process] Even research code benefits greatly from automated testing. My approach to getting started: if you need to write additional code to verify that some functionality is working, that additional code should be written as a test. -
05 Nov 2021
Research Generating high-quality explanations for navigation in partially-revealed environments[Research] We generate explanations of a robot agent’s behavior as it navigates through a partially-revealed environment, expressed in terms of changes to its predictions about what lies in unseen space. Blog post accompanying our NeurIPS 2021 paper. -
27 Aug 2021
Workflow & Process Underpromise and overdeliver to your future self[Workflow & Process] I’ve started to think of expectation management as a part of self-care, and I try to think of myself as an other. As such, I try to underpromise and overdeliver to my future self. -
16 Jul 2021
Workflow & Process Action items should have well-defined end conditions[Workflow & Process] I try to make sure that my tasks are both easy to start making progress towards and have clear completion criteria, essential criteria for making sure they get done. -
02 Jul 2021
Communication & Learning Reviewing papers is incredibly valuable experience[Communication & Learning] Looking at the in-development work of others pulls back the curtain and reveals insight into the thought process of other researchers. Reviews are a largely-untapped pedagogical resource. -
21 Jun 2021
Workflow & Process Accelerating team research with containers[Workflow & Process] All code in my research group is run exclusively inside Docker containers, helping us develop more quickly and share code with ease. -
06 Jan 2020
Communication & Learning Talk figures are different from paper figures[Communication & Learning] One communication pitfall I often see is that many researchers will take figures from their papers and paste them into their slides. Here, I provide some tips for tailoring your figures to talks. -
29 Dec 2019
Research Machine Learning & Robotics: My (biased) 2019 State of the Field[Research] My thoughts on the past year of progress in Robotics and Machine Learning (2019). -
16 Dec 2018
Research DeepMind's AlphaZero and The Real World[Research] Using DeepMind’s AlphaZero AI to solve real problems will require a change in the way computers represent and think about the world. In this post, we discuss how abstract models of the world can be used for better AI decision making and discuss recent work of ours that proposes such a model for the task of navigation.
