All Publications
Updated as of October 2025. See my Google Scholar page for updates.
show all bibtex entries
hide all bibtex entries
Peer Reviewed Papers
- Mohamed Aghzal, Gregory J. Stein, and Ziyu Yao. “Why Do LLM-based Web Agents Fail? A Hierarchical Planning Perspective.” Annual Meeting of the Association for Computational Linguistics (ACL). in press. 2026. show bibtex
@inproceedings{aghzal2026webagent,
title = {Why Do LLM-based Web Agents Fail? A
Hierarchical Planning Perspective},
author = {Aghzal, Mohamed and Stein, Gregory J.
and Yao, Ziyu},
booktitle = {Annual Meeting of the Association for
Computational Linguistics (ACL)},
year = {2026},
}
- Hoang-Dung Bui, Erion Plaku, and Gregory J. Stein. “Multi-Agent Path Finding Under Limited Communication Range Constraint via Dynamic Leading.” Journal of Artificial Intelligence Research (JAIR), vol. 85, pp. 1–21, 2026.
ArXiv show bibtex
@article{bui2026mapf,
title = {Multi-Agent Path Finding Under Limited Communication
Range Constraint via Dynamic Leading},
author = {Bui, Hoang-Dung and Plaku, Erion and
Stein, Gregory J.},
journal = {Journal of Artificial Intelligence Research},
volume = {85},
pages = {1–21},
year = {2026},
}
- Philip Baldoni, James D. Turner, James McMahon, and Gregory J. Stein. “Towards Low-Risk Surfacing of Autonomous Underwater Vehicles in the Presence of Maritime Traffic.” IEEE Robotics and Automation Letters (RA-L). 11(3), pp. 3438–3445. 2026.
paper show bibtex
@article{baldoni2026auv,
title = {Towards Low-Risk Surfacing of Autonomous Underwater
Vehicles in the Presence of Maritime Traffic},
author = {Baldoni, Philip and Turner, James D. and
McMahon, James and Stein, Gregory J.},
journal = {IEEE Robotics and Automation Letters},
volume = {11},
number = {3},
pages = {3438–3445},
year = {2026},
doi = {10.1109/LRA.2026.3656788},
}
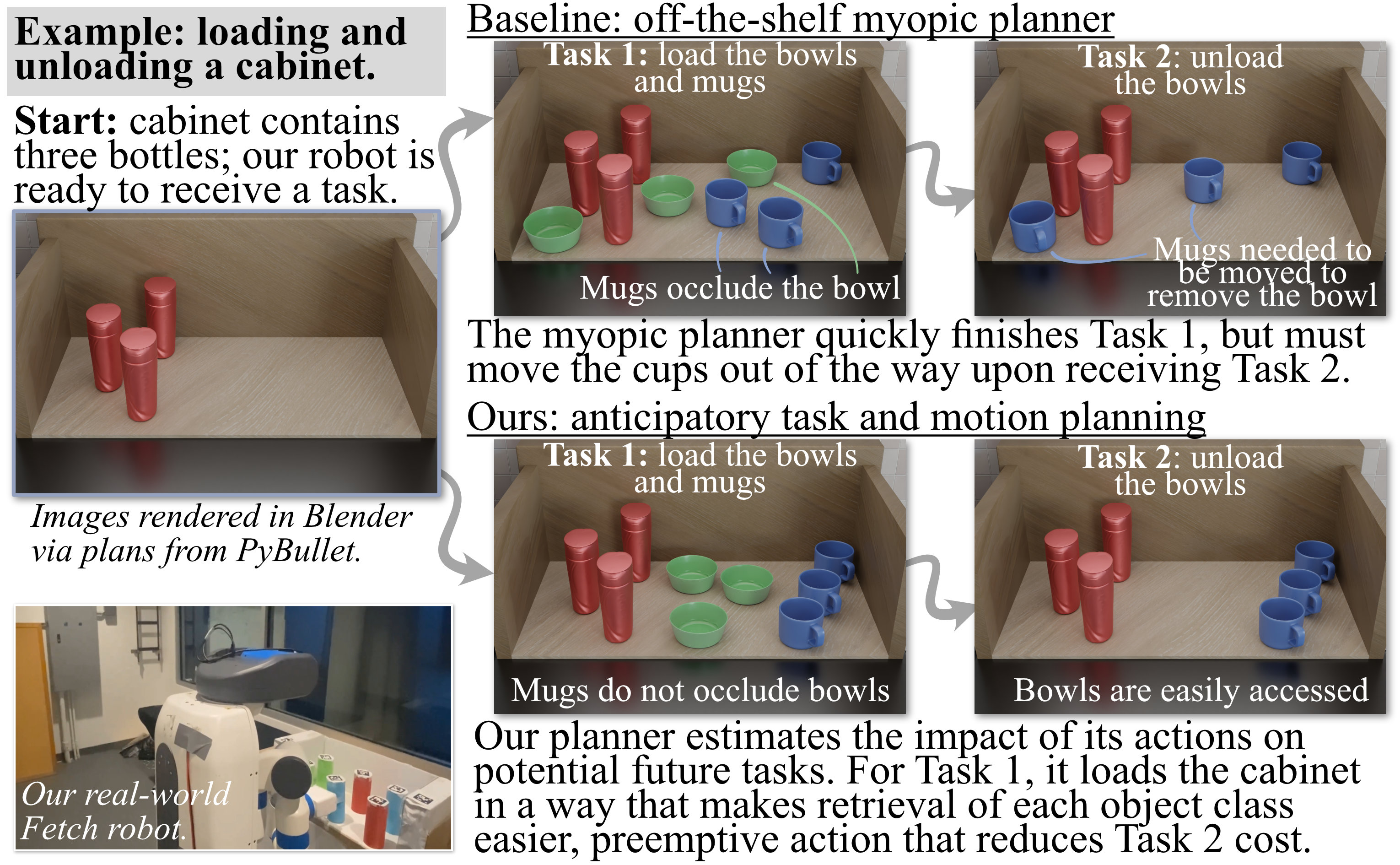
- Roshan Dhakal, Duc M. Nguyen, Tom Silver, Xuesu Xiao, and Gregory J. Stein. “Anticipatory Task and Motion Planning: Improved Rearrangement in Persistent Continuous-Space Environments.” IEEE Robotics and Automation Letters (RA-L). 11(2), pp. 1850–1857. 2026.
paper, ArXiv show bibtex
@article{dhakal2025anttamp,
title = {Anticipatory Task and Motion Planning: Improved
Rearrangement in Persistent Continuous-Space
Environments},
author = {Dhakal, Roshan and Nguyen, Duc M and
Silver, Tom and Xiao, Xuesu and
Stein, Gregory J.},
journal = {IEEE Robotics and Automation Letters},
volume = {11},
number = {2},
pages = {1850–1857},
year = {2026},
}
- Abhish Khanal, Joseph Prince Mathew, Cameron Nowzari, Gregory J Stein. “Learning-Augmented Model-Based Multi-Robot Planning for Time-Critical Search and Inspection Under Uncertainty.” In: International Conference on Automation Science and Engineering (CASE). 2025. paper. show bibtex
@inproceedings{khanal2025mrsearch,
title = {Learning-Augmented Model-Based Multi-Robot
Planning for Time-Critical Search and
Inspection Under Uncertainty},
author = {Abhish Khanal and Joseph Prince Mathew and
Cameron Nowzari and Gregory J. Stein},
booktitle = {International Conference on Automation Science
and Engineering (CASE)},
pages = {969--975},
year = {2025},
}
- Arnab Debnath, Gregory J. Stein, and Jana Košecká. “A Hybrid Approach to Indoor Social Navigation: Integrating Reactive Local Planning and Proactive Global Planning.” In: International Conference on Robotics and Automation (ICRA). pp. 10432–10438. 2025.
paper, ArXiv show bibtex
@inproceedings{debnath2025hybrid,
author = {Arnab Debnath and Gregory J. Stein and Jana Košecká},
title = {A Hybrid Approach to Indoor Social Navigation: Integrating
Reactive Local Planning and Proactive Global Planning},
booktitle = {International Conference on Robotics and Automation (ICRA)},
pages = {10432–10438},
year = {2025},
}
- Md Ridwan Hossain Talukder, Raihan Islam Arnob, and Gregory J. Stein. “Anticipatory Planning for Performant Long-Lived Robot in Large-Scale Home-Like Environments.” In: International Conference on Robotics and Automation (ICRA). 2025. ArXiv link. show bibtex
@inproceedings{talukder2025anticipatory,
author = {Md Ridwan Hossain Talukder and Raihan Islam Arnob
and Gregory J. Stein},
title = {Anticipatory Planning for Performant Long-Lived Robot
in Large-Scale Home-Like Environments},
booktitle = {International Conference on Robotics and
Automation (ICRA)},
year = {2025},
}
- Abhishek Paudel, Xuesu Xiao, and Gregory J. Stein. “Multi-Strategy Deployment-Time Learning and Adaptation for Navigation under Uncertainty.” In: Conference on Robot Learning (CoRL). 2024. paper, video. show bibtex
@inproceedings{paudel2024multistrategy,
author = {Abhishek Paudel and Xuesu Xiao and Gregory J. Stein},
title = {Multi-Strategy Deployment-Time Learning and Adaptation
for Navigation under Uncertainty},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2024},
}
- Yanlin Zhou, Manshi Limbu, Gregory J. Stein, Xuan Wang, Daigo Shishika, and Xuesu Xiao. “Team Coordination on Graphs: Problem, Analysis, and Algorithms.” In: International Conference on Intelligent Robots and Systems (IROS). 2024. paper, ArXiv. show bibtex
@inproceedings{zhou2024team,
author = {Yanlin Zhou and Manshi Limbu and Gregory J. Stein and Xuan
Wang and Daigo Shishika and Xuesu Xiao},
title = {Team Coordination on Graphs: Problem, Analysis, and
Algorithms},
booktitle = {International Conference on Intelligent Robots and Systems
(IROS)},
year = {2024},
}
- Abhish Khanal, Hoang-Dung Bui, Erion Plaku, and Gregory J. Stein. “Learning-Informed Long-Horizon Navigation under Uncertainty for Vehicles with Dynamics.” In: International Conference on Intelligent Robots and Systems (IROS). 2024. paper. show bibtex
@inproceedings{khanal2024learning,
author = {Abhish Khanal and Hoang-Dung Bui and Erion Plaku and Gregory
J. Stein},
title = {Learning-Informed Long-Horizon Navigation under Uncertainty
for Vehicles with Dynamics},
booktitle = {International Conference on Intelligent Robots and Systems
(IROS)},
year = {2024},
}
- Raihan Islam Arnob and Gregory J. Stein. “Active Information Gathering for Long-Horizon Navigation Under Uncertainty by Learning the Value of Information.” In: International Conference on Intelligent Robots and Systems (IROS). 2024. paper, ArXiv. show bibtex
@inproceedings{arnob2024active,
author = {Raihan Islam Arnob and Gregory J. Stein},
title = {Active Information Gathering for Long-Horizon Navigation Under
Uncertainty by Learning the Value of Information},
booktitle = {International Conference on Intelligent Robots and Systems
(IROS)},
year = {2024},
}
- Hoang-Dung Bui, Erion Plaku, and Gregory J. Stein. “Multi-Robot Guided Sampling-Based Motion Planning with Dynamics in Partially Mapped Environments.” IEEE Access. 2024. paper. show bibtex
@article{bui2024mrsampling,
title = {Multi-Robot Guided Sampling-Based Motion
Planning with Dynamics in Partially Mapped
Environments},
author = {Bui, Hoang-Dung and Plaku, Erion and Stein,
Gregory J.},
journal = {IEEE Access},
volume = {12},
year = {2024},
}
- Yimeng Li, Arnab Debnath, Gregory J. Stein, and Jana Kosecka. “Learning-augmented model-based planning for visual exploration.” In: International Conference on Intelligent Robots and Systems (IROS). 2023. paper. show bibtex
@inproceedings{li2023modelexplore,
author = {Yimeng Li and Arnab Debnath and Gregory J. Stein and Jana
Kosecka},
title = {Learning-augmented model-based planning for
visual exploration},
booktitle = {International Conference on Intelligent Robots
and Systems (IROS)},
year = {2023},
note = {in press},
}
- Raihan Islam Arnob and Gregory J. Stein. “Improving Reliable Navigation under Uncertainty via Predictions Informed by Non-Local Information.” In: International Conference on Intelligent Robots and Systems (IROS). 2023. paper. show bibtex
@inproceedings{arnob2023lspgnn,
title = {Improving Reliable Navigation under Uncertainty via
Predictions Informed by Non-Local Information},
author = {Arnob, Raihan Islam and Stein, Gregory J.},
booktitle = {International Conference on Intelligent Robots
and Systems (IROS)},
year = {2023},
note = {in press},
}
- Abhishek Paudel and Gregory J. Stein. “Data-Efficient Policy Selection for Navigation in Partial Maps via Subgoal-Based Abstraction.” In: International Conference on Intelligent Robots and Systems (IROS). 2023. paper, blog post. show bibtex
@inproceedings{paudel2023selection,
title = {Data-Efficient Policy Selection for Navigation in
Partial Maps via Subgoal-Based Abstraction},
author = {Paudel, Abhishek and Stein, Gregory J.},
booktitle = {International Conference on Intelligent Robots
and Systems (IROS)},
year = {2023},
note = {in press},
}
- Abhish Khanal, Hoang-Dung Bui, Gregory J. Stein, Erion Plaku: “Guided Sampling-Based Motion Planning with Dynamics in Unknown Environments.” In: International Conference on Automation Science and Engineering (CASE). 2023. paper. show bibtex
@inproceedings{khanal2023guided,
title = {Guided Sampling-Based Motion Planning with Dynamics
in Unknown Environments},
author = {Khanal, Abhish and Bui, Hoang-Dung and Stein, Gregory J. and Plaku, Erion},
booktitle = {International Conference on Automation Science
and Engineering (CASE)},
year = {2023},
note = {in press},
}
- Roshan Dhakal, Md Ridwan Hossain Talukder, Gregory J. Stein. “Anticipatory Planning: Improving Long-Lived Planning by Estimating Expected Cost of Future Tasks.” In: International Conference on Robotics and Automation (ICRA). 2023. paper. show bibtex
@inproceedings{dhakal2023anticipatory,
title = {Anticipatory Planning: Improving Long-Lived Planning
by Estimating Expected Cost of Future Tasks},
author = {Dhakal, Roshan and Talukder, Md Ridwan Hossain
and Stein, Gregory J.},
booktitle = {International Conference on Robotics and Automation (ICRA)},
pages = {11538--11545},
year = {2023},
}
- Abhish Khanal and Gregory J. Stein. “Learning Augmented, Multi-Robot Long-Horizon Navigation in Partially Mapped Environments.” In: International Conference on Robotics and Automation (ICRA). 2023. paper. show bibtex
@inproceedings{khanal2023mrlsp,
title = {Learning Augmented, Multi-Robot Long-Horizon Navigation in
Partially Mapped Environments},
author = {Khanal, Abhish and Stein, Gregory J.},
booktitle = {International Conference on Robotics and Automation (ICRA)},
pages = {10167--10173},
year = {2023},
}
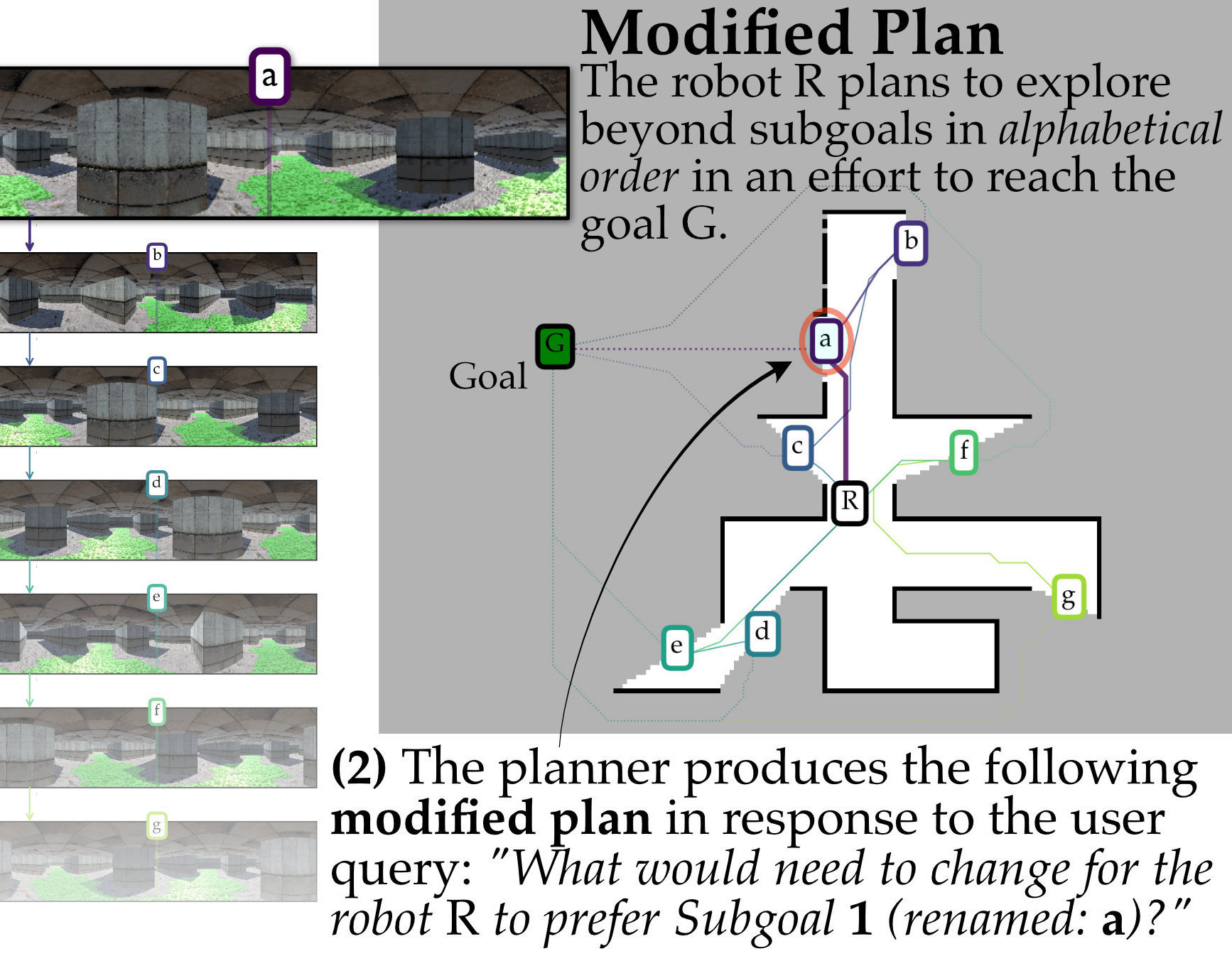
- Gregory J. Stein. “Generating High-Quality Explanations for Navigation in Partially-Revealed Environments.” In: Advances in Neural Information Processing Systems (NeurIPS). 2021. paper, talk (13 min), GitHub, blog post. show bibtex
@inproceedings{stein2021xailsp,
title = {Generating High-Quality Explanations for Navigation
in Partially-Revealed Environments},
author = {Gregory J. Stein},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
pages = {17493–17506},
year = {2021},
keywords = {explainability; planning under uncertainty;
subgoal-based planning; interpretable-by-design},
}
- Christopher Bradley, Adam Pacheck, Gregory J. Stein, Sebastian Castro, Hadas Kress-Gazit, and Nicholas Roy. “Learning and Planning for Temporally Extended Tasks in Unknown Environments.” In: International Conference on Robotics and Automation (ICRA). 2021. paper, talk (3 min). show bibtex
@inproceedings{bradley2021potlp,
title = {Learning and Planning for Temporally Extended Tasks in Unknown
Environments},
author = {Christopher Bradley and Adam Pacheck and Gregory J. Stein and
Sebastian Castro and Hadas Kress-Gazit and Nicholas Roy},
booktitle = {International Conference on Robotics and Automation (ICRA)},
pages = {4830--4836},
year = {2021},
}
- Gregory J. Stein, Christopher Bradley, Victoria Preston, and Nicholas Roy. “Enabling Topological Planning with Monocular Vision.” In: International Conference on Robotics and Automation (ICRA). 2020. paper, talk (10 min). show bibtex
@inproceedings{stein2020gapnav,
author = {Stein, Gregory J. and Bradley, Christopher and Preston,
Victoria and Roy, Nicholas},
booktitle = {International Conference on Robotics and Automation (ICRA)},
title = {Enabling Topological Planning with Monocular Vision},
pages = {1667–1673},
year = 2020,
keywords = {topological mapping, topological planning, frontiers,
multi-agent search, exploration, learning},
}
- Gregory J. Stein, Christopher Bradley, and Nicholas Roy. “Learning over Subgoals for Efficient Navigation of Structured, Unknown Environments.” In: Conference on Robot Learning (CoRL). 2018. paper, talk (14 min). show bibtex
@inproceedings{stein2018subgoal,
author = {Stein, Gregory J. and Bradley, Christopher and Roy, Nicholas},
title = {Learning over Subgoals for Efficient Navigation of Structured,
Unknown Environments},
booktitle = {Conference on Robot Learning (CoRL)},
pages = {213--222},
year = {2018},
}
Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
 Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
Best Paper Finalist at CoRL 2018; Best Oral Presentation at CoRL 2018.
- Gregory J. Stein and Nicholas Roy. “GeneSIS-RT: Generating Synthetic Images for training Secondary Real-World Tasks”. In: International Conference on Robotics and Automation (ICRA). 2018. paper. show bibtex
@inproceedings{stein2018genesisrt,
author = {Stein, Gregory J. and Roy, Nicholas},
title = {{GeneSIS-RT}: Generating Synthetic Images for training
Secondary Real-World Tasks},
booktitle = {International Conference on Robotics and Automation (ICRA)},
pages = {7151--7158},
year = 2018,
keywords = {semantic segmentation, reactive obstacle avoidance,
domain adaptation},
}
- Mycal Tucker, Derya Aksaray, Rohan Paul, Gregory J. Stein, and Nicholas Roy. “Learning Unknown Groundings for Natural Language Interaction with Mobile Robots”. In: Robotics Research: The 18th International Symposium (ISRR). 2020. show bibtex
@inproceedings{tucker2020upup,
author = {Tucker, Mycal and Aksaray, Derya and Paul, Rohan and Stein,
Gregory J. and Roy, Nicholas},
title = {Learning unknown groundings for natural language interaction
with mobile robots},
booktitle = {Robotics Research: The 18th International Symposium (ISRR)},
pages = {317--333},
year = {2020},
}
Workshop Papers
- Arnab Debnath, Gregory J. Stein, and Jana Kosecka. “SemNav: A Model-Based Planner for Zero-Shot Object Goal Navigation Using Vision-Foundation Models.” In: Foundation Models Meet Embodied Agents Workshop at CVPR. 2025. paper. show bibtex
@inproceedings{debnath2025semnav,
author = {Arnab Debnath and Gregory J. Stein and Jana Kosecka},
title = {{SemNav}: A Model-Based Planner for Zero-Shot Object
Goal Navigation Using Vision-Foundation Models},
booktitle = {Foundation Models Meet Embodied Agents Workshop at CVPR},
year = {2025},
}
- Abhishek Paudel and Gregory J. Stein. “Deployment-time Selection of Prompts for LLM-informed Object Search in Partially-Known Environments.” In: Workshop on on Foundation Models and Neuro-Symbolic AI for Robotics (FMNS) at ICRA. 2025. paper. show bibtex
@inproceedings{paudel2025llmselect,
author = {Abhishek Paudel and Gregory J. Stein},
title = {Deployment-time Selection of Prompts for {LLM}-informed
Object Search in Partially-Known Environments},
booktitle = {Workshop on Foundation Models and Neuro-Symbolic
AI for Robotics (FMNS) at ICRA},
year = {2025},
month = {May},
note = {Workshop paper}
}
- Shahriar Hossain, Abhishek Paudel, and Gregory J. Stein. “Enhancing Object Search by Augmenting Planning with Predictions from Large Language Models.” In: Workshop on Learning Effective Abstractions for Planning, Conference on Robot Learning (CoRL). 2024. paper. show bibtex
@inproceedings{hossain2024llmsearch,
author = {Shahriar Hossain and Abhishek Paudel and Gregory J. Stein},
title = {Enhancing Object Search by Augmenting Planning with
Predictions from Large Language Models},
booktitle = {Workshop on Learning Effective Abstractions for Planning
(LEAP) at CoRL},
year = {2024},
}
- Yimeng Li, Arnab Debnath, Gregory J. Stein, and Jana Kosecka. “Comparison of Model Free and Model-Based Learning-Informed Planning for PointGoal Navigation.” In: Workshop on Learning, Perception, and Abstraction for Long-Horizon Planning, Conference on Robot Learning (CoRL). 2023. paper. show bibtex
@inproceedings{li2022lspcomp,
author = {Yimeng Li and Arnab Debnath and Gregory J. Stein and Jana
Kosecka},
title = {Comparison of Model Free and Model-Based Learning-Informed
Planning for PointGoal Navigation},
booktitle = {Workshop on Learning, Perception, and Abstraction for
Long-Horizon Planning, CoRL},
year = {2022},
}
Preprints & Manuscripts
- Mohamed Aghzal, Erion Plaku, Gregory J Stein, and Ziyu Yao. “A survey on large language models for automated planning.” Preprint. 2025. ArXiv link show bibtex
@article{aghzal2025llmsurvey,
title = {A survey on large language models
for automated planning},
author = {Mohamed Aghzal and Erion Plaku and Gregory
J. Stein and Ziyu Yao},
journal = {arXiv preprint arXiv:2502.12435},
year = {2025},
}